Introduktion¶
Gemini RoadVisor är en tilläggsmodul till Gemini Terrain+ för dynamisk beräkning av spårkurvor och kontroll av siktförhållanden i projekterade trafiklanläggningar. Modulen används för att bedöma om ett valt fordon kan manövrera inom tillgänglig yta, och om aktuella siktkrav kan uppfyllas i den projekterade lösningen.
RoadVisor är utvecklat för att stödja projektering och kvalitetssäkring i situationer där fordonsgeometri, ytbehov och sikt är dimensionerande faktorer.
Funktionen finns i verktygsfältet Planering, projektering och utförande.
Syfte¶
Syftet med modulen är att:
- dokumentera framkomlighet för dimensionerande fordon
- analysera fordonets ytbehov i kurvor och manövrar
- kontrollera siktförhållanden i den projekterade modellen
- upptäcka konflikter tidigt i projekteringsprocessen
- ge ett bättre underlag för projektering, bedömning och dokumentation
Den visar spårkurvorna och fordonen i planvy och i 3D:
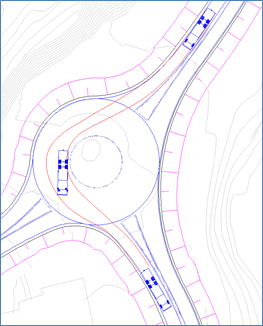
Spårkurvor visade i 2D-vy
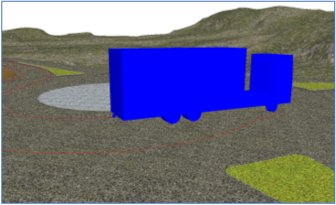
Spårkurvor visade i 3D-vy
Målgrupp¶
Dokumentationen riktar sig till:
- vägplanerare
- trafikingenjörer
- rådgivare inom väg och infrastruktur
- projekterande inom kommunal och statlig sektor
- användare av Gemini Terrain+ som arbetar med trafikanlägningar och ytutformning
Omfattning¶
Denna dokumentation beskriver allmän användning av modulen, typiska arbetssätt, centrala fackliga förutsättningar och hur resultat bör tolkas. Dokumentationen är avsedd som en övergripande användarguide och måste ses i samband med projektkrav, gällande regelverk och övrig systemdokumentation.
Statiska spårmallar¶
Gemini Terrain+ innehåller även statiska spårmallar för dimensionerande fordon. Dessa visar vilket manöverutrymme de enskilda fordonsenheterna behöver vid sväng i korsningar med vinklar på 30, 60, 90, 120, 150 och 180 grader.
Du hittar figurerna i verktygsfältet Figurbibliotek.
De statiska mallarna kan vara användbara som en snabb referens i enkla och standardiserade situationer. Eftersom de baseras på fasta förutsättningar räcker de ofta inte till i projekt där geometri, körmönster eller fordon avviker från standardfallen.
Tips
För mer realistiska och projektanpassade bedömningar används dynamisk spåranalys i Gemini RoadVisor som beskrivs i detta kapitel.