Punktmolnsbehandling¶
Punktmoln innehåller ofta brus, ojämn punkttäthet och punkter som inte är relevanta för den vidare modelleringen. Innan triangulering eller beräkningar bör datamängden därför granskas och anpassas till syftet.
SurfaceMaker erbjuder flera funktioner för detta.
När du har markerat ett punktmoln i teckningen kan du högerklicka för att få åtkomst till specifika punktmolnsfunktioner.
Några aktuella funktioner:
Observera
Vissa val är endast tillgängliga på snabbmenyn om en linje också ingår i urvalet.
Automatisk brusavlägsning¶
Automatisk brusavlägsning används för att identifiera punkter som tydligt avviker från sin omgivning. Detta görs normalt med statistiska metoder, där punkter med stora avvikelser i förhållande till lokal punktstruktur kan klassificeras som brus eller outliers.
Sådana metoder är särskilt användbara vid:
- skannade data med slumpmässiga felreflektioner
- punkter från regn, damm eller rörliga objekt
- datamängder med enstaka felpunkter ovanför eller under faktisk yta
Automatisk brusavlägsning bör alltid bedömas mot datakvalitet och projektkrav. För aggressiv filtrering kan ta bort verkliga detaljer i ytan.
Denna funktion rekommenderas för användning på plana ytor, till exempel skannade konstruktioner. Funktionen fungerar mindre optimalt på ojämna ytor som knotriga bergsskärningar.
Funktionen bestämmer ett plan som passar bäst till punkturvalet. Fältet Antal grannar bestämmer hur många punkter som ska tas med åt gången.
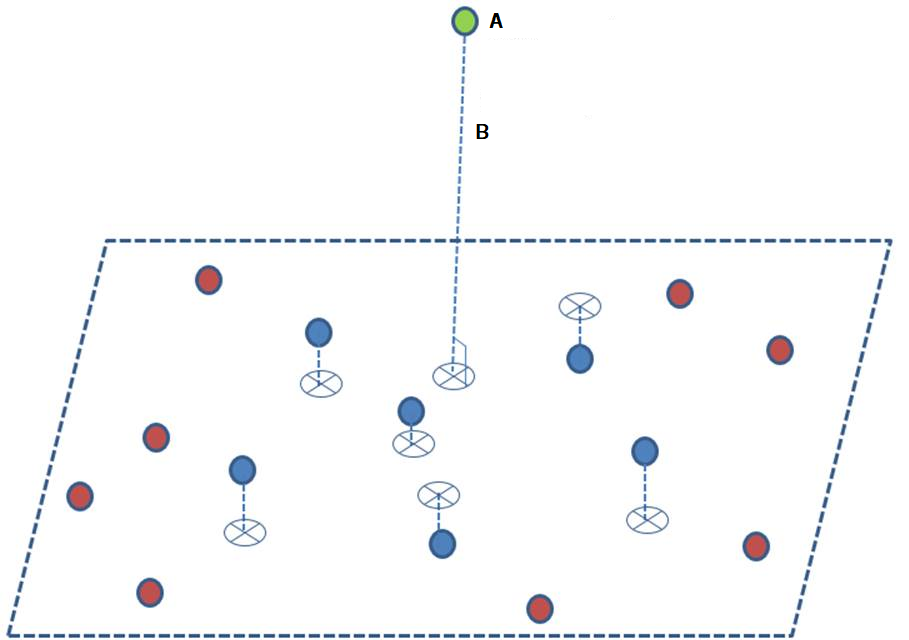
Figur: A = Intressepunkt (grönt), B = Avstånd till planet (streckad linje). Figuren visar bäst anpassat plan genom 6 (blå) grannpunkter.
När alla avstånd är beräknade görs en analys för att hitta standardavvikelsen i beräknade avstånd. Gränsvärdet för borttagning av punkter sätts till standardavvikelse × sigmanivå. Alla punkter med avstånd större än detta gränsvärde klassificeras som brus och tas bort.
Du kan välja att bevara de borttagna punkterna som ett separat punktmoln. Detta val är aktiverat som standard, och punktmolnet placeras på samma lager som resultatet.
Exempel
Om standardavvikelsen beräknas till 0,05 m och du använder sigmanivå = 6 blir gränsvärdet 0,3 m.
Tips
Det rekommenderas att använda ett sigmavärde på 6 eller högre. Lägre värden kan medföra att punkter i områden med "skarpa knickar" felaktigt identifieras som brus och tas bort.
Observera att en upprepad operation på det resulterande punktmolnet med samma parametrar sannolikt kommer att ta bort ytterligare punkter. Detta sker eftersom en ny och mindre standardavvikelse beräknas, vilket resulterar i ett lägre gränsvärde för borttagning.
Om önskat kan processen upprepas tills alla bruspunkter är borttagna.
Punktreduktion¶
Vid mycket täta punktmoln kan det vara lämpligt att minska antalet punkter. Cellbaserad punktreduktion används för att normalisera punkttätheten och minska datamängden utan att förlora onödigt mycket geometrisk information.
Detta ger fördelar som:
- snabbare bearbetning och triangulering
- mer stabila modeller
- bättre anpassning till önskad modellupplösning
Valet av upplösning bör anpassas till syftet. För dokumentation av grova terrängtytor kan en relativt grov reduktion vara tillräcklig, medan detaljerad kontroll av berg eller konstruktioner ofta kräver högre täthet.
Minska med cellstorlek¶
Detta val kan användas för att minska antalet punkter i ett punktmoln. Baserat på angiven cellstorlek (bounding box) väljer programmet en punkt utifrån vald metod för att representera cellen.
Exempel¶
Exemplet nedan visar användning av metoden Medelvärde:
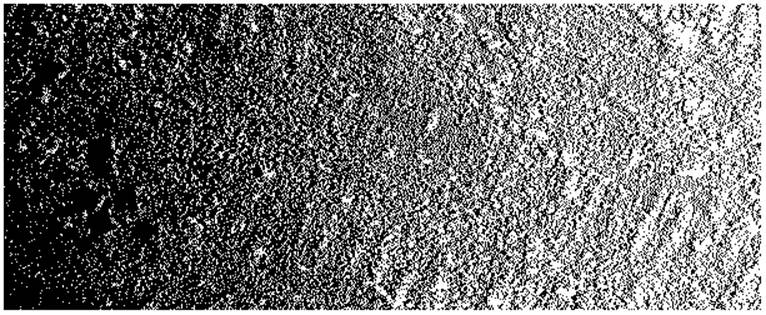
Ursprungligt punktmoln från markskanning där tätheten är större ju närmare skannern du är. Tätheten varierar från 0,01 till 0,1 meter.
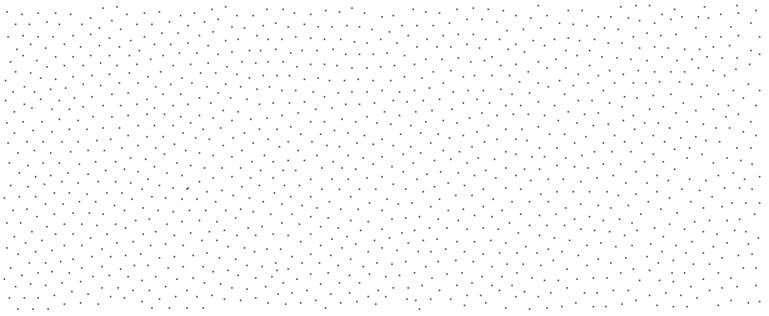
Resulterande punktmoln efter reduktion med cellstorlek på 0,1 meter.
Observera
Funktionen baserar sig uteslutande på en geometrisk betraktelse på närhet mellan punkter. Den tar inte speciella hänsyn till randzoner eller skarpa knickar i data.
Algoritmen hittar de närmaste punkterna inom den definierade cellstorleken och beräknar ett medelvärde (x,y,z) för dessa punkter.
Ta bort punkter i platta områden¶
Denna funktion fungerar motsatt mot Brusavlägsning. Punkter tas bort när avvikelsen är mindre än gränsvärdet (standardavvikelse × sigmanivå).
Exempel¶
Funktionen är till exempel användbar i samband med ingrepp.
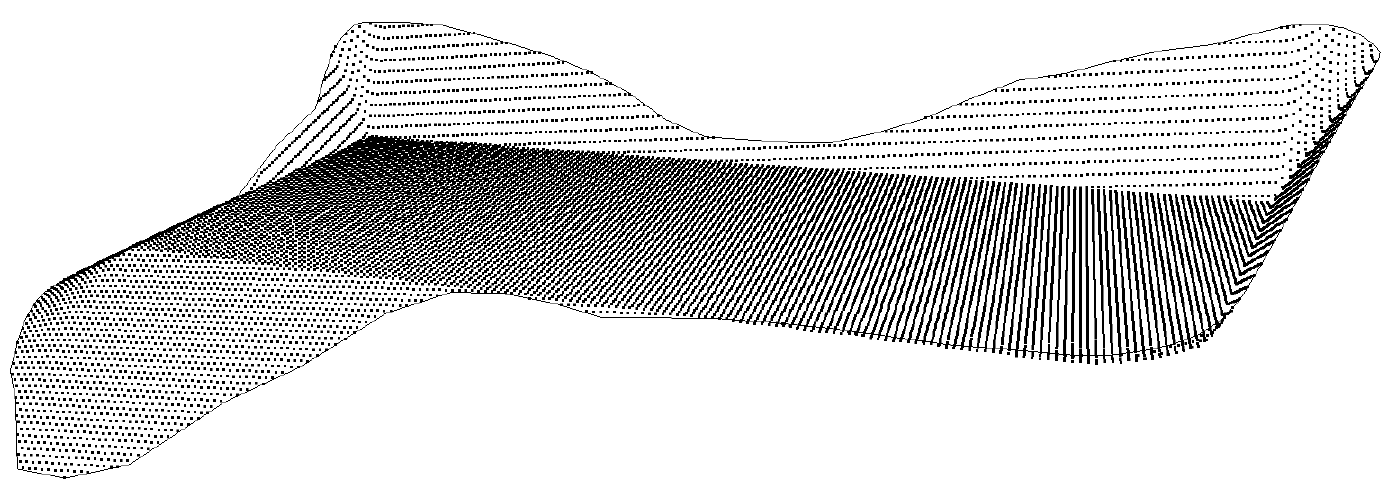
Punktmoln före borttagning av punkter i platta områden.
Punktmoln efter borttagning av punkter i platta områden – endast betydande höjdvariationer är bevarade.
Resultatslager¶
Du kan själv välja var resultatet ska lagras. Som standard föreslår programmet det aktiva lagret.
Punktmoln i resultatslager tilldelas egenskaper från bearbetningen:
| Attribut | Kod | Beskrivning |
|---|---|---|
| S_JOBRESULT | S20 Brus borttaget (Punktmoln där brus har tagits bort) | Kodvärden som anger hur punktmolnet skapades och vad det innehåller. S20 och S21 genereras när man bockar för Ta bort brus, S22 när man bockar för Minska med cellstorlek |
| S21 Borttagna bruspunkter (Punktmoln med punkter klassificerade som brus) | ||
| S22 Förenklat för 3D-cellstorlek | ||
| Proc_SigmaLevel | Inmatad standardavvikelse sigmanivå | |
| Proc_StdDev | Standardavvikelse för beräkningen | |
| Proc_CellSize | Cellstorlek för Minska med cellstorlek |
Linjebaserad redigering¶
Linjebaserad redigering används när data ska bearbetas i anslutning till kända sträckor eller konstruktionslinjer, till exempel väglinjer, tunnelaxlar eller VA-linjer. Detta gör det enklare att extrahera eller redigera data inom bestämda korridorer eller sektioner.
Manuell 3D-redigering¶
Manuell redigering används för lokal upprensning och kvalitetskontroll där automatiska metoder inte är tillräckliga. Detta är ofta nödvändigt i områden med komplex geometri, skuggeffekter, blandning av terräng och konstruktion eller andra förhållanden som kräver facklig bedömning.
Generellt är det god praxis att kombinera automatiska filter med visuell kontroll och manuell efterredigering innan den slutliga modellen etableras.