Introduction¶
Gemini RoadVisor is an add-on module for Gemini Terrain+ for dynamic calculation of swept path curves and verification of sight conditions in designed traffic facilities. The module is used to assess whether a selected vehicle can maneuver within the available space, and whether the applicable sight requirements can be met in the designed solution.
RoadVisor is developed to support design and quality assurance in situations where vehicle geometry, space requirements, and sight distance are dimensioning factors.
The function is found in the Planning, design and construction toolset.
Purpose¶
The purpose of the module is to:
- document accessibility for dimensioning vehicles
- analyze the vehicle's space requirements in curves and maneuvers
- check sight conditions in the designed model
- identify conflicts early in the design process
- provide a better basis for design, assessment, and documentation
It displays the swept path curves and vehicles in plan view and in 3D:
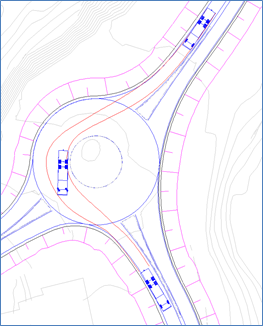
Swept path curves shown in 2D view
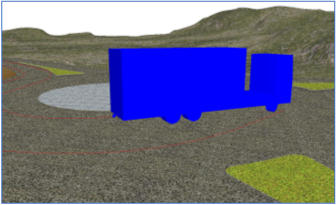
Swept path curves shown in 3D view
Target Audience¶
The documentation is aimed at:
- road planners
- transportation engineers
- consultants within road and infrastructure
- designers in the municipal and government sector
- users of Gemini Terrain+ working with traffic facilities and area design
Scope¶
This documentation describes general use of the module, typical workflows, key professional prerequisites, and how results should be interpreted. The documentation is intended as a high-level user guide and must be viewed in conjunction with project requirements, applicable regulations, and other system documentation.
Static Swept Path Templates¶
Gemini Terrain+ also includes static swept path templates for dimensioning vehicles. These show the maneuvering area required by each vehicle unit when turning at intersections with angles of 30, 60, 90, 120, 150, and 180 degrees.
The figures are found in the Figure Library toolset.
The static templates can be useful as a quick reference in simple and standardized situations. Since they are based on fixed assumptions, they will often be insufficient in projects where geometry, driving patterns, or vehicles deviate from standard cases.
Tip
For more realistic and project-specific assessments, use the dynamic swept path analysis in Gemini RoadVisor as described in this chapter.