Punktskybehandling¶
Punktskyer inneholder ofte støy, ujevn punkttetthet og punkter som ikke er relevante for den videre modelleringen. Før triangulering eller beregninger bør datasettet derfor gjennomgås og tilpasses formålet.
SurfaceMaker tilbyr flere funksjoner for dette.
Når du har merket en punktsky i tegningen, kan du høyreklikke for å få tilgang til spesifikke punktskyfunksjoner.
Noen aktuelle funksjoner:
Merk
Noen valg er kun tilgjengelig på hurtigmenyen dersom en linje også inngår i utvalget.
Automatisk støyfjerning¶
Automatisk støyfjerning brukes for å identifisere punkter som avviker klart fra sine omgivelser. Dette gjøres normalt ved statistiske metoder, der punkter med store avvik i forhold til lokal punktstruktur kan klassifiseres som støy eller outliers.
Slike metoder er særlig nyttige ved:
- skannede data med tilfeldige feilrefleksjoner
- punkter fra regn, støv eller bevegelige objekter
- datasett med enkeltstående feilpunkter over eller under faktisk overflate
Automatisk støyfjerning bør alltid vurderes opp mot datakvalitet og prosjektkrav. For aggressiv filtrering kan fjerne reelle detaljer i overflaten.
Denne funksjonen anbefales for bruk på plane flater, for eksempel skannede konstruksjoner. Funksjonen fungerer mindre optimalt på ujevne overflater som knudrete fjellskjæringer.
Funksjonen bestemmer et plan som passer best til punktutvalget. Feltet for Antall naboer bestemmer hvor mange punkt som skal tas med om gangen.
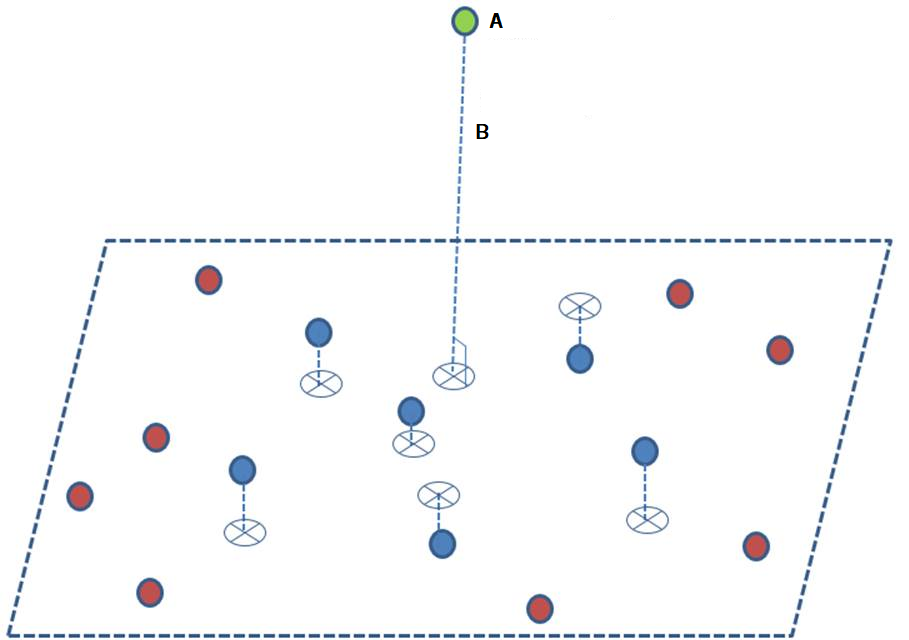
Figur: A = Interessepunkt (grønt), B = Avstand til planet (stiplet linje). Figuren viser best tilpasset plan gjennom 6 (blå) nabopunkt.
Når alle avstandene er beregnet, gjøres det en analyse for å finne standardavviket i beregnede avstander. Grenseverdien for fjerning av punkt settes til standardavvik × sigmanivå. Alle punkter med avstand større enn denne grenseverdien klassifiseres som støy og fjernes.
Du kan velge å bevare de fjernede punktene som en separat punktsky. Dette valget er aktivert som standard, og punktskyen plasseres på samme lag som resultatet.
Eksempel
Hvis standardavviket beregnes til 0,05 m, og du benytter sigmanivå = 6, blir grenseverdien 0,3 m.
Tips
Det anbefales å benytte en sigmaverdi på 6 eller høyere. Lavere verdier kan medføre at punkter i områder med "skarpe knekker" feilaktig identifiseres som støy og fjernes.
Merk at en gjentatt operasjon på resulterende punktsky med samme parametre vil sannsynligvis fjerne ytterligere punkter. Dette skjer fordi et nytt og mindre standardavvik beregnes, noe som resulterer i en lavere grenseverdi for fjerning.
Om ønskelig kan prosessen gjentas inntil alle støypunkter er fjernet.
Punktreduksjon¶
Ved svært tette punktskyer kan det være hensiktsmessig å redusere antall punkter. Cellebasert punktreduksjon brukes for å normalisere punkttettheten og redusere datamengden uten å miste unødvendig mye geometrisk informasjon.
Dette gir fordeler som:
- raskere behandling og triangulering
- mer stabile modeller
- bedre tilpasning til ønsket modelloppløsning
Valg av oppløsning bør tilpasses formålet. Til dokumentasjon av grove terrengflater kan en relativt grov reduksjon være tilstrekkelig, mens detaljert kontroll av berg eller konstruksjoner ofte krever høyere tetthet.
Redusere med cellestørrelse¶
Dette valget kan vi bruke til å redusere antall punkt i en punktsky. På grunnlag av oppgitt cellestørrelse (bounding box) plukker programmet et punkt basert på valgt metode til å representere cellen.
Eksempel¶
Eksempelet nedenfor viser bruk av metoden Gjennomsnitt:
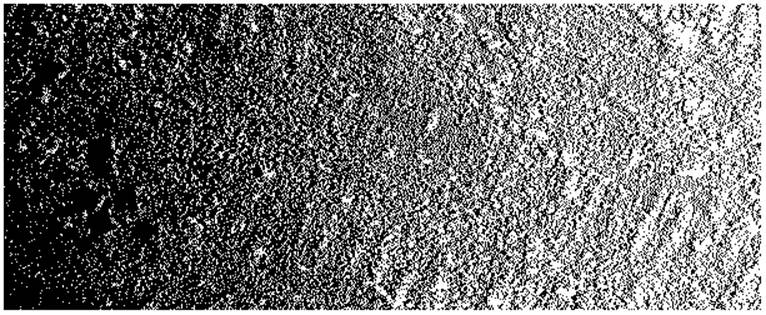
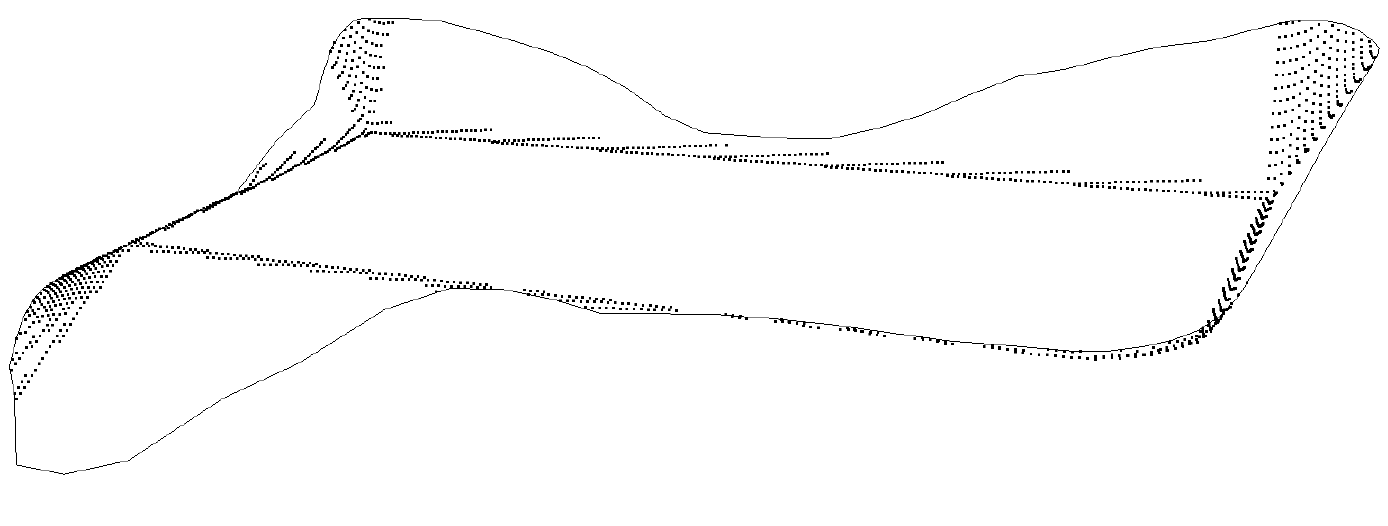
Opprinnelig punktsky fra bakkeskann der tettheten er større jo nærmere skanneren du er. Tettheten varierer fra 0,01 til 0,1 meter.
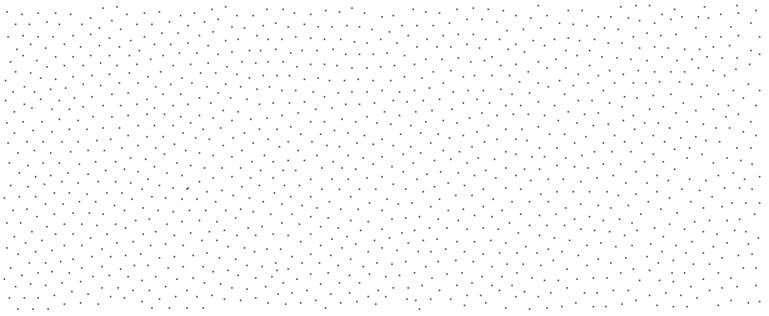
Resulterende punktsky etter reduksjon med cellestørrelse på 0,1 meter.
Merk
Funksjonen baserer seg utelukkende på en geometrisk betraktning på nærhet mellom punkter. Den tar ikke spesielle hensyn til randsoner eller skarpe knekker i dataene.
Algoritmen finner de nærmeste punktene innenfor den definerte cellestørrelsen og beregner en middelverdi (x,y,z) for disse punktene.
Fjerne punkt i flate områder¶
Denne funksjonen fungerer motsatt av Fjerning av støy. Punkter fjernes når avviket er mindre enn grenseverdien (standardavvik × sigmanivå).
Eksempel¶
Funksjonen er eksempelvis nyttig i forbindelse med inngrep.
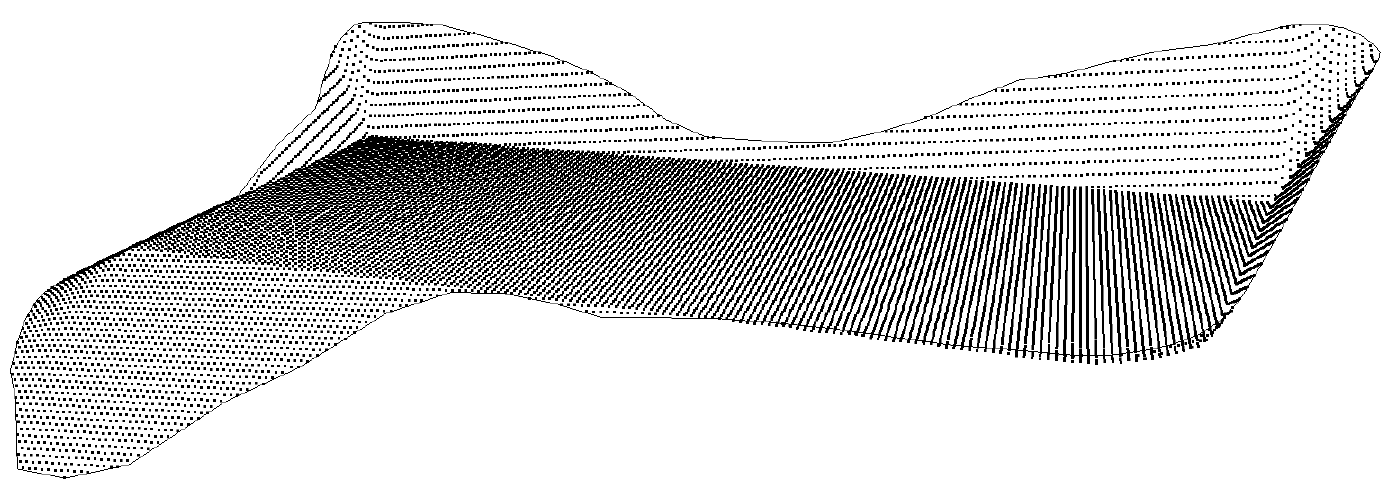
Punktsky før fjerning av punkter i flate områder.
Punktsky etter fjerning av punkter i flate områder – kun betydelige høydevariasjoner er beholdt.
Resultatapplag¶
Du kan selv velge hvor resultatet skal lagres. Som standard foreslår programmet det aktive laget.
Punktskyer i resultatlag tilføres egenskaper fra prosesseringen:
| Attributt | Kode | Beskrivelse |
|---|---|---|
| S_JOBRESULT | S20 Støy fjernet (Punktsky hvor støy er fjernet) | Kodeverdier som inngir hvordan punktskyen er opprettet og hva den inneholder. S20 og S21 genereres når man huker av for Fjerne støy, S22 når man huker av for Redusere med cellestørrelse |
| S21 Fjernede støypunkter (Punktsky med punkter klassifisert som støy) | ||
| S22 Simplifisert for 3D-cellestørrelse | ||
| Proc_SigmaLevel | Inngitt standardavvik sigmanivå | |
| Proc_StdDev | Standardavvik for beregningen | |
| Proc_CellSize | Cellestørrelse for Redusere med cellestørrelse |
Linjebasert redigering¶
Redigering langs linje brukes når data skal bearbeides i tilknytning til kjente traseer eller konstruksjonslinjer, for eksempel veglinjer, tunnelakser eller VA-linjer. Dette gjør det enklere å trekke ut eller redigere data innenfor bestemte korridorer eller profiler.
Manuell 3D-redigering¶
Manuell redigering brukes for lokal opprydding og kvalitetskontroll der automatiske metoder ikke er tilstrekkelige. Dette er ofte nødvendig i områder med kompleks geometri, skyggevirkninger, blanding av terreng og konstruksjon eller andre forhold som krever faglig vurdering.
Generelt er det god praksis å kombinere automatiske filtre med visuell kontroll og manuell etterredigering før endelig modell etableres.