Point Cloud Processing¶
Point clouds often contain noise, uneven point density, and points that are not relevant for further modeling. Before triangulation or calculations, the dataset should therefore be reviewed and adapted to the purpose.
SurfaceMaker offers several functions for this.
When you have selected a point cloud in the drawing, you can right-click to access specific point cloud functions.
Some relevant functions:
Note
Some options are only available in the context menu if a line is also included in the selection.
Automatic Noise Removal¶
Automatic noise removal is used to identify points that clearly deviate from their surroundings. This is normally done using statistical methods, where points with large deviations relative to the local point structure can be classified as noise or outliers.
Such methods are particularly useful for:
- scanned data with random false reflections
- points from rain, dust, or moving objects
- datasets with isolated erroneous points above or below the actual surface
Automatic noise removal should always be assessed against data quality and project requirements. Too aggressive filtering can remove real details from the surface.
This function is recommended for use on flat surfaces, such as scanned structures. The function works less optimally on uneven surfaces such as rough rock cuts.
The function determines a plane that best fits the point selection. The Number of neighbors field defines how many points to include at a time.
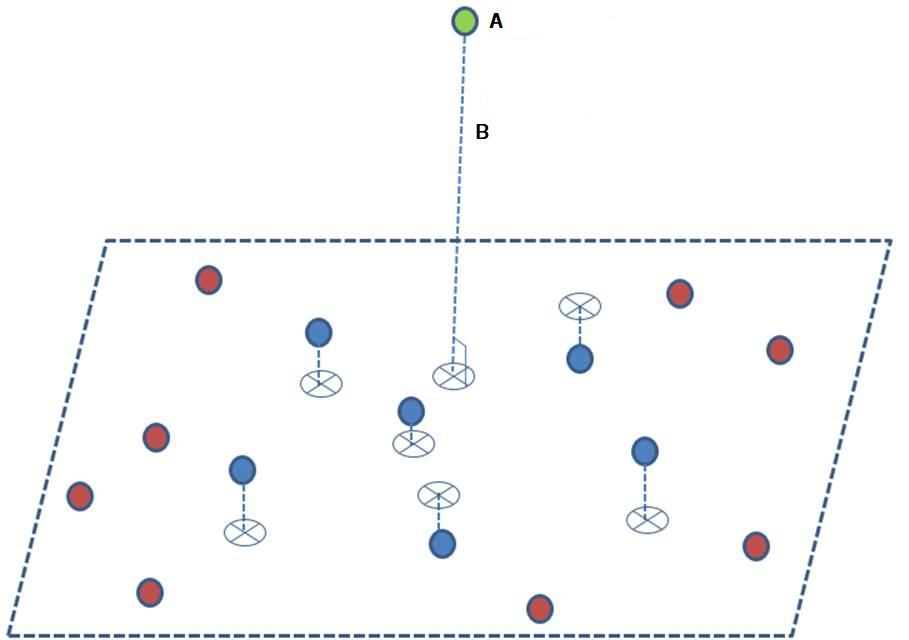
Figure: A = Point of interest (green), B = Distance to the plane (dotted line). The figure shows the best-fit plane through 6 (blue) neighboring points.
When all distances are calculated, an analysis is performed to find the standard deviation of the calculated distances. The threshold for point removal is set to standard deviation × sigma level. All points with a distance greater than this threshold are classified as noise and removed.
You can choose to preserve the removed points as a separate point cloud. This option is enabled by default, and the point cloud is placed on the same layer as the result.
Example
If the standard deviation is calculated as 0.05 m, and you use a sigma level of 6, the threshold becomes 0.3 m.
Tip
It is recommended to use a sigma value of 6 or higher. Lower values may cause points in areas with "sharp edges" to be incorrectly identified as noise and removed.
Note that a repeated operation on the resulting point cloud with the same parameters will likely remove additional points. This occurs because a new and smaller standard deviation is calculated, resulting in a lower threshold for removal.
If desired, the process can be repeated until all noise points are removed.
Point Reduction¶
For very dense point clouds, it may be appropriate to reduce the number of points. Cell-based point reduction is used to normalize point density and reduce the data volume without losing unnecessary geometric information.
This provides advantages such as:
- faster processing and triangulation
- more stable models
- better adaptation to the desired model resolution
The choice of resolution should be adapted to the purpose. For documentation of rough terrain surfaces, a relatively coarse reduction may be sufficient, while detailed control of rock or structures often requires higher density.
Reducing by Cell Size¶
This option can be used to reduce the number of points in a point cloud. Based on the specified cell size (bounding box), the program selects a point based on the chosen method to represent the cell.
Example¶
The example below shows the use of the Average method:
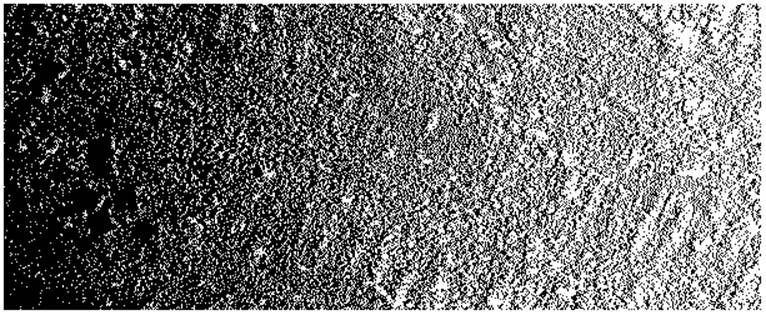
Original point cloud from ground scan where density is greater the closer you are to the scanner. Density varies from 0.01 to 0.1 meters.
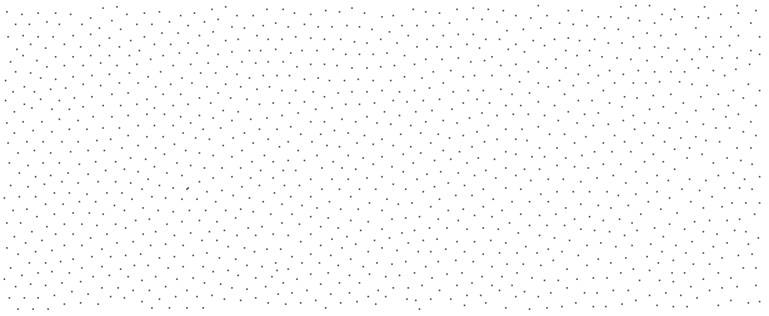
Resulting point cloud after reduction with a cell size of 0.1 meters.
Note
The function is based exclusively on geometric considerations of proximity between points. It does not take special account of edge zones or sharp breaks in the data.
The algorithm finds the nearest points within the defined cell size and calculates an average value (x,y,z) for these points.
Removing Points in Flat Areas¶
This function works opposite to Noise Removal. Points are removed when the deviation is less than the threshold (standard deviation × sigma level).
Example¶
The function is particularly useful in connection with terrain interventions.
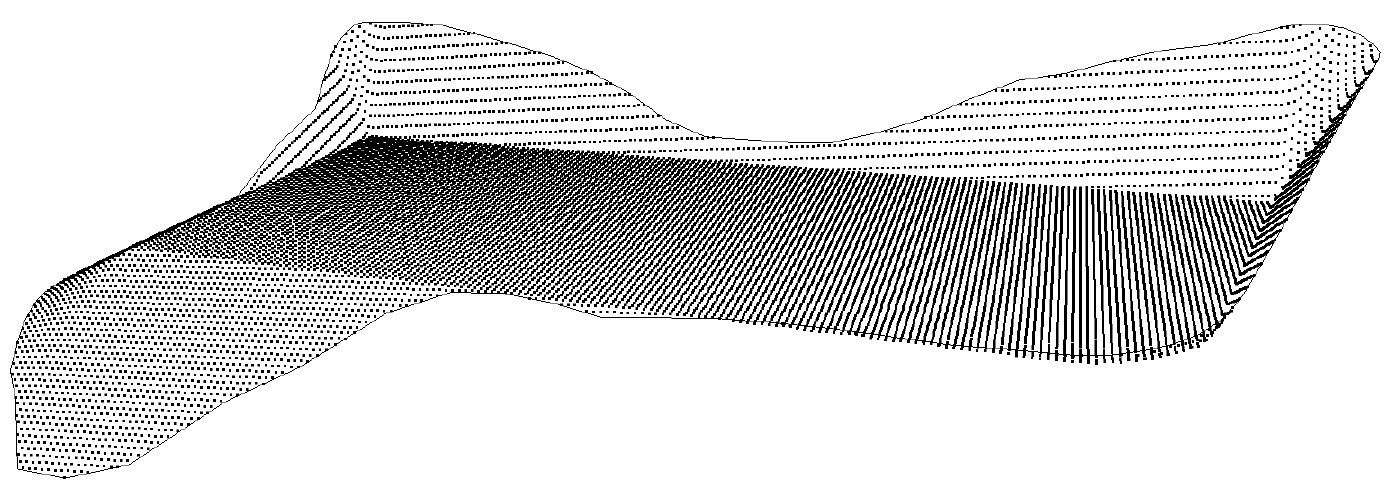
Point cloud before removal of points in flat areas.
Point cloud after removal of points in flat areas – only significant height variations are retained.
Result Layer¶
You can choose where the result should be stored. By default, the program suggests the active layer.
Point clouds in the result layer are assigned properties from the processing:
| Attribute | Code | Description |
|---|---|---|
| S_JOBRESULT | S20 Noise removed (Point cloud where noise has been removed) | Code values indicating how the point cloud was created and what it contains. S20 and S21 are generated when checking Remove noise, S22 when checking Reduce by cell size |
| S21 Removed noise points (Point cloud with points classified as noise) | ||
| S22 Simplified for 3D cell size | ||
| Proc_SigmaLevel | Input standard deviation sigma level | |
| Proc_StdDev | Standard deviation for the calculation | |
| Proc_CellSize | Cell size for Reduce by cell size |
Line-Based Editing¶
Line-based editing is used when data needs to be processed in relation to known alignments or construction lines, such as road lines, tunnel axes, or utility lines. This makes it easier to extract or edit data within specific corridors or profiles.
Manual 3D Editing¶
Manual editing is used for local cleanup and quality control where automatic methods are insufficient. This is often necessary in areas with complex geometry, shadow effects, a mix of terrain and construction, or other conditions requiring professional assessment.
In general, it is good practice to combine automatic filters with visual inspection and manual post-editing before the final model is established.