Main Features¶
RoadVisor is used in projects where vehicle movement, swept path requirements, and sight conditions are important for the design of road and traffic areas. The module is particularly relevant where available space is limited, or where special vehicles impose requirements on geometry.
The module can be used in, among others, the following situations:
- intersections and channelized intersections
- roundabouts
- driveways and access roads
- terminal areas
- bus facilities
- rest areas
- turning areas
- delivery areas
- parking and maneuvering areas
- narrow urban spaces
- other areas with limited space and requirements for documented accessibility
Swept Path Analysis¶
Swept path analysis is used to check how a vehicle moves through a curve or maneuver, and how much space is required.
Typical considerations:
- Does the vehicle pass through without conflict?
- Is the turning radius and width sufficient?
- Is there a need for overridable areas?
- Does conflict occur with curbs, islands, or other objects?
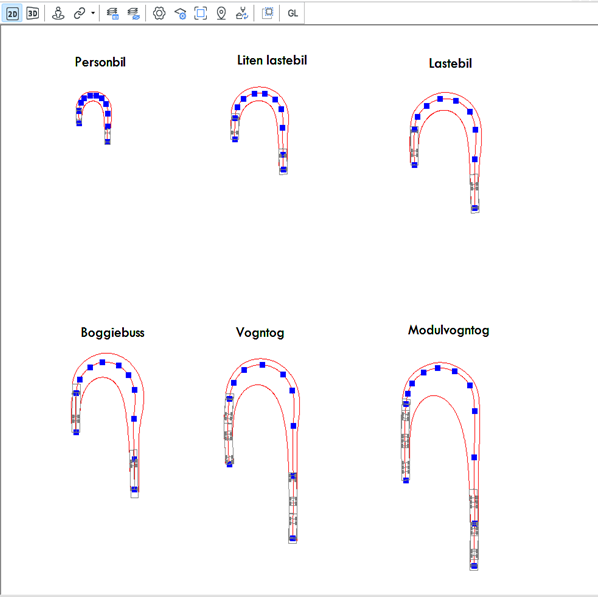
Standard vehicles defined in N100
Editor for Custom Vehicles¶
The module has its own editor for defining custom vehicles. This makes it possible to adapt the analysis to vehicles not covered by the standard library defined in the Norwegian Public Roads Administration's handbook N100 Road and Street Design, for example:
- special vehicles
- local operational vehicles
- project-specific vehicle combinations
- vehicles with particular geometric properties
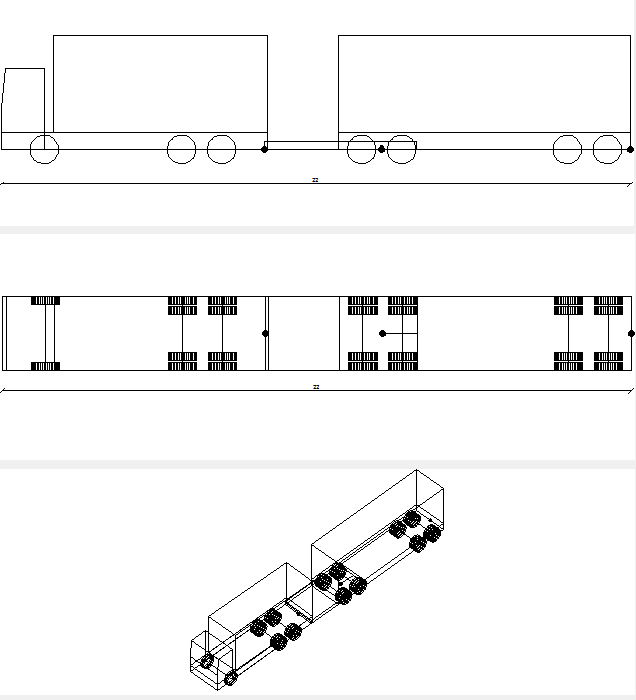
Vehicles defined in editor
Support for Active Rear Axle Steering¶
RoadVisor also supports vehicles with active rear axle steering. This provides a more realistic analysis basis for vehicles where the rear axles actively contribute to the turning movement, and is particularly relevant for modern buses, special vehicles, and certain larger vehicle combinations.
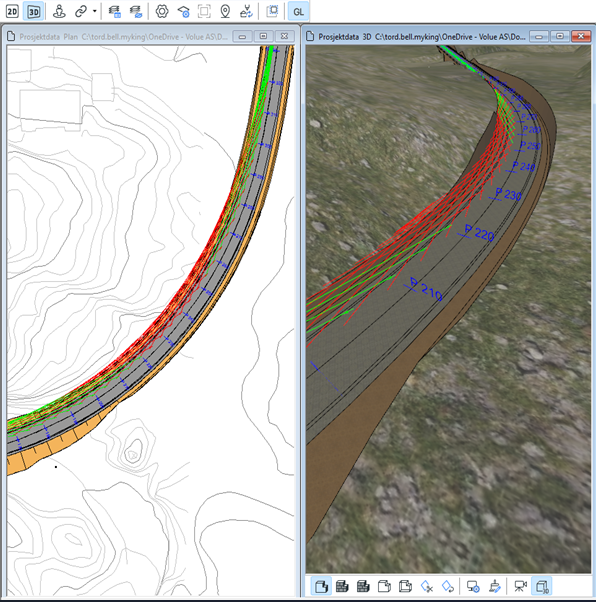
Special vehicles with active rear axle steering
Sight Distance Check¶
Sight distance check is used to verify whether terrain, geometry, or objects obstruct the required sight distance in the designed solution.
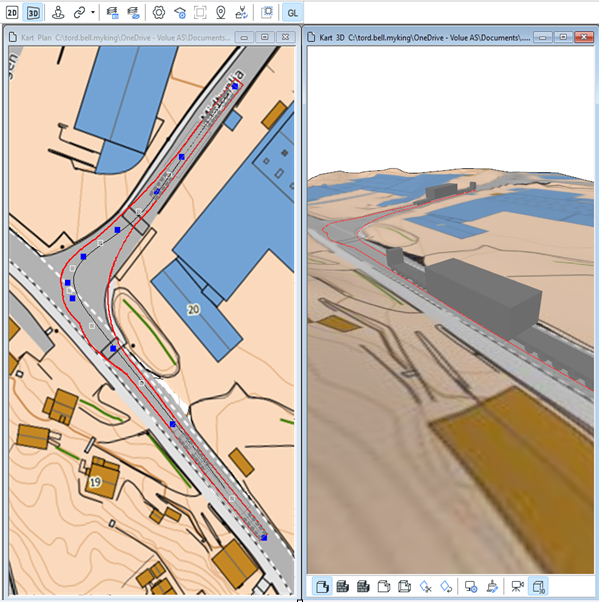
Sight lines in 2D and 3D view